Libro Feedback Control Of Dynamic Bipedal Robot Locomotion PDF

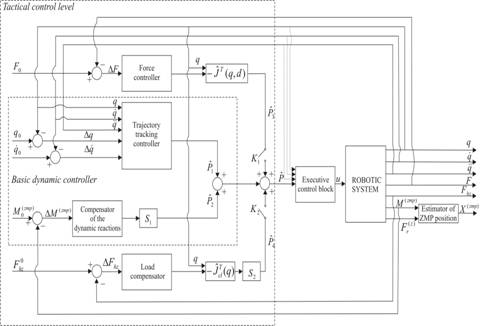
locomoción bípeda es uno de los retos más difíciles en el control de la ingeniería. La mayoría de los libros tratan el tema desde una perspectiva cuasi-estática, con vistas a la naturaleza híbrida de la mecánica bípedos. Control de retroalimentación de la dinámica del robot bípedo locomoción es el primer libro para presentar un tratamiento integral y matemáticamente sonido de diseño de retroalimentación para el logro de la locomoción bípeda estable, ágil y eficiente en los robots. En este tratado único e innovador, autores expertos conducirán a través de cada paso del proceso sistemáticamente, incluyendo: el modelado matemático de caminar y correr aires en robots planas; análisis de órbitas periódicas en sistemas híbridos; diseño y análisis de sistemas de retroalimentación para la consecución de los movimientos periódicos estables; algoritmos para la síntesis de los controladores de retroalimentación; Ejemplos de simulación detallada; y, en dos implementaciones bípedos experimental elegancia beds.The prueba del enfoque de los autores es evidente en la unión de la teoría de control y la mecánica, uniendo presentación basada en el Control y la costumbre matemática con un enfoque basado en la mecánica al problema y rendering.Concrete computacional numerosos ejemplos e ilustraciones complementan y aclaran la discusión matemática. Un sitio web ofrece apoyo a los vínculos de vídeo de varios experimentos para Junto con Matlab código [domicilio] para varios de los modelos. Este libro único en su tipo construye una sólida comprensión de los aspectos teóricos y prácticos de la locomoción bípeda verdaderamente dinámica en los robots planas.
Eric R. Westervelt
Video de Feedback Control Of Dynamic Bipedal Robot Locomotion Youtube
Imagenes de Feedback Control Of Dynamic Bipedal Robot Locomotion para descarga